The demo
Two crops in, one panorama out
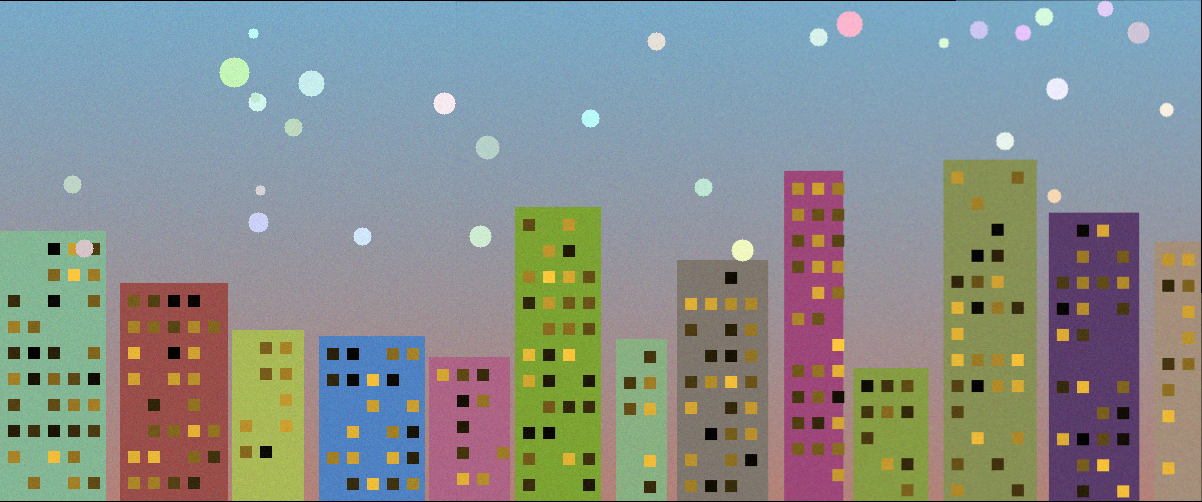
The bundled demo splits a 1200×500 textured skyline into two overlapping 744×500 crops, then stitches them back together. ORB finds matches, RANSAC fits the homography that the most matches agree on, and the overlap is feather-blended away.
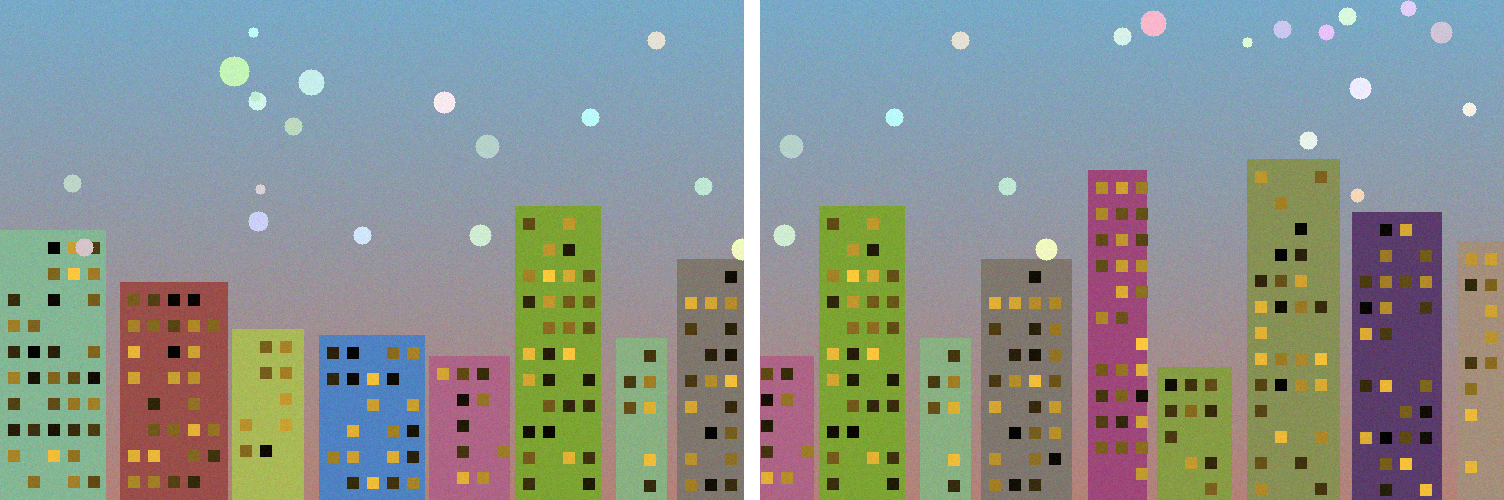
554
feature matches
478
RANSAC inliers · 86%
0.265px
mean reproj. error
1202×502
output (truth: 1200×500)
pip install -r requirements.txt
python stitch.py # bundled demo → output.png
python stitch.py a.jpg b.jpg c.jpg -o pano.png # your own photos
python -m pytest -q # 11 passing testsNumbers above are from a real run on the OpenCV ORB backend. The reconstructed panorama lands within 2 px of the original scene the crops were cut from.